Extrinsic Parameters
Transformation
Transformation from "world space" to "camera space": 6 degree of freedom.
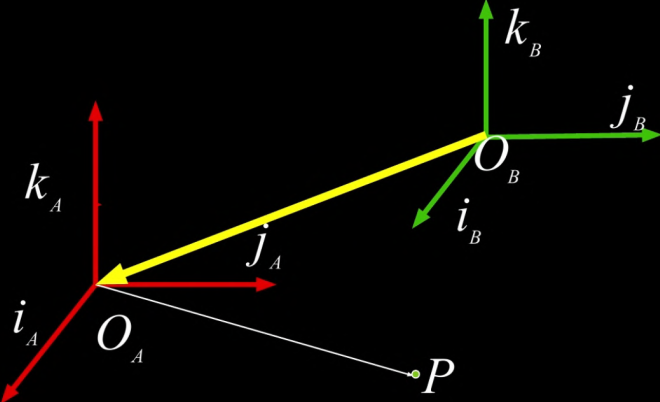
Notation
is the coordinates of in frame .
Given some origin ,
Translation
 Using homogeneous coordinates, translation can be expressed as a matrix multiplication.
Where is 3x3 identity.
Using homogeneous coordinates, translation can be expressed as a matrix multiplication.
Where is 3x3 identity.
Translation is commutative.
Rotation
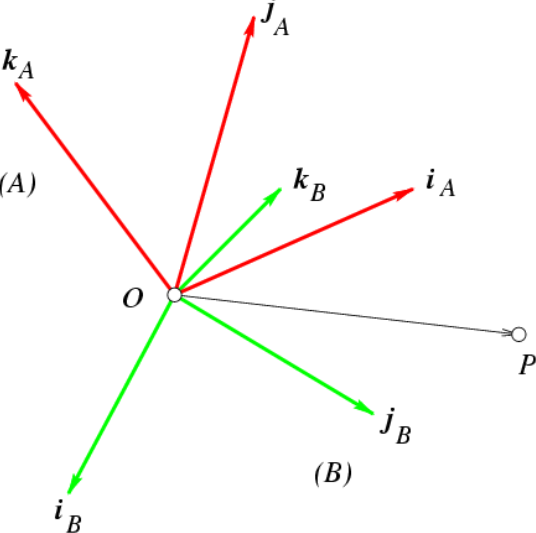 is the rotation matrix, which means describing frame A in the coordinates system of frame B
is the rotation matrix, which means describing frame A in the coordinates system of frame B
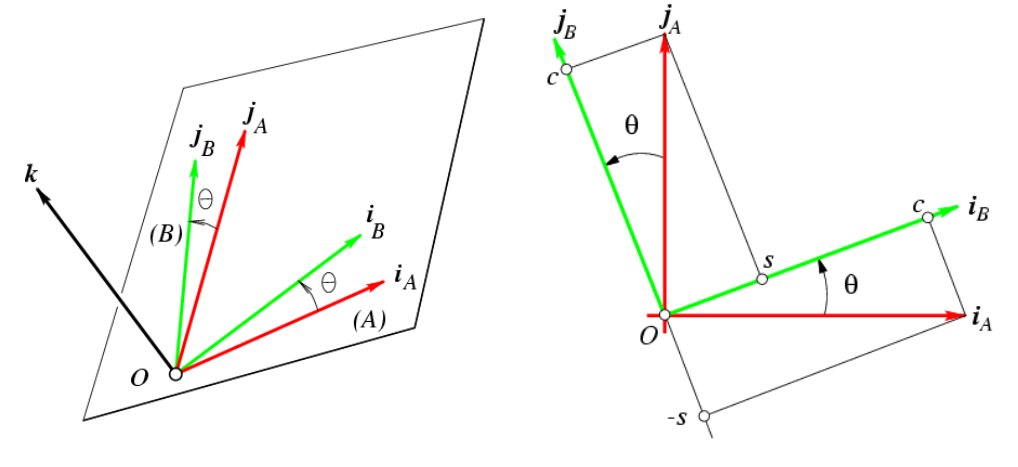
Example: Rotation about z axis
Rotation with Homogeneous Coordinates
Rotation is not commutative
Total Rigid Transformation
Using homogeneous coordinates: So Homogeneous coordinates:
Homogeneous coordinates allows us to write coordinate transforms as a single matrix!
From World to Camera
From world to camera is the extrinsic parameter matrix (4 x 4)